 返回
发布
返回
发布





清华大学智能产业研究院联合百度Apollo 发布车路协同技术创新白皮书
2021-06-25 09:05:33
2021 年,我们距自动驾驶的未来似乎非常接近,又非常遥远。
今年,一部分高阶自动驾驶车型已经迈入量产,完全无人化的 Robotaxi 也进入了早期测试阶段。
仅以百度 Apollo 为例,其与威马合作搭载 AVP 自主泊车系统的车型威马 W6 已量产上市。
5 月,Apollo 在北京首钢园区向公众开放了主驾驶位无人的 Robotaxi。
也就是说,普通消费者现在立刻马上就能买到带有高阶自动驾驶功能的车型,或者付费使用完全无人驾驶的服务。
但前提是,这些车型的售价/成本并不低廉,高级别的自动驾驶功能或者完全无人驾驶,需要在特定场景下才能运行。
无论对于哪个级别的自动驾驶,安全性、ODD(设计运营区域)以及经济性是衡量技术商业化程度的三个要素。
加速自动驾驶的发展,核心就是持续提高自动驾驶系统的安全性,扩大自动驾驶系统可运行的 ODD 范围以及改善系统的经济性。
但如何同时做到这 3 点呢?

6 月 24 日,清华大学智能产业研究院(AIR)联合百度 Apollo 共同发布了全球第一份车路协同技术创新白皮书《面向自动驾驶的车路协同关键技术与展望》。
一边是中国顶级学府的人工智能产业研究机构,另一边是中国最早投入自动驾驶研究的平台公司,清华和百度联合发布的这份白皮书指出了:
发展车路协同将是自动驾驶规模化和商业化的必经之路。
单车智能面临的三大挑战
当前,全球业内主流的自动驾驶方案是 2 条路线:
- 单车智能(Autonomous Driving,简称「AD」)
- 车路协同(Vehicle-Infrastructure Cooperated Autonomous Driving,简称「VICAD」)
Waymo 和特斯拉走的都是 AD 单车智能的路线。
而单车智能当前正面临三重挑战,这表现在这两家公司身上尤为明显:
1. 经济性堪忧。
Waymo 为了保证自动驾驶系统的安全,最大程度地减少车辆盲区并且消除单一传感器的感知局限,因此它选择在车辆上搭载了堪称「奢华」的传感器配置——5 个激光雷达、6 个毫米波雷达以及 29 个摄像头,这些传感器加上高规格的计算单元导致 Waymo 的自动驾驶车辆成本高企。
2. ODD 设计运营区域有限。
同样为了保障安全,Waymo 的车队目前仅在亚利桑那州的凤凰城等少数几个人烟相对稀少并且经过大量测试的地域运营。
3. 安全性。
Waymo 采用高成本的系统方案以及有限的 ODD 运营范围,从而保障自动驾驶车队的安全性,但弊端在于在前两者的限制下,实际上 Waymo 的商业化进程缓慢。
而特斯拉刚好相反,特斯拉采用了以视觉为主的传感器方案,将整套系统成本降低,同时将 ODD 范围拓展到绝大部分的高速封闭道路以及一部分的开放城市道路。
这样反过来导致系统的安全性相比高等级自动驾驶方案大幅降低,从 2016 年开始特斯拉不断发生 Autopilot 开启时用户在交通意外中死亡的事故。
这样看来,在 AD 单车智能的技术路线上,经济性、ODD 和安全性似乎永远是顾此失彼,难以兼得的多重要素。
而 VICAD 车路协同提供了一种完全不同的思路。
车路协同是自动驾驶的必由之路
「靠单车智能,现在高速公路的自动驾驶基本上做的还是不错的。但要进入城市道路,尤其在路口这样的地方,就会存在问题。现在从技术上提出新的办法,就是车路协同。」
在白皮书的发布仪式上,同济大学汽车安全技术研究所所长朱西产表示。
单车智能遇到的最典型困境,就是视线遮挡以及感知识别算法失效。
比如在前方大车严重遮挡的情况下,即使在车端增加多个激光雷达,也是无法弥补的。
相反,如果放在路端,可能只需要增加几个摄像头就可以解决,并且路端的摄像头可以实现多车共享,利用率也将大幅提升。
白皮书以鬼探头、前方大车避让、路口非机动车闯红灯以及异形的红绿灯举了多个案例:
①这类场景就是常见的鬼探头,行人突然从大车后走出,仅凭单车智能,自动驾驶车辆需要在极短的时间内进行识别、决策和控制,容易引发事故。
而路端设备则可以提前感知到行人或对向车辆的动向,为自动驾驶系统预留充足的响应时间。
②跟车过程中,本车道前方发生交通事故,前方大车临近时突然避让,可能导致后方自动驾驶车辆避让不及。
同样,路端感知设备可以提前发现事故,并通知自动驾驶车辆提前进行决策规划。
③在十字路口,自动驾驶车辆绿灯起步时,横向车道有非机动车违规闯红灯快速切入本车车道,车路协同配合也能提前感知,避免事故发生。
④各地红绿灯的设置各异,视觉感知算法在异形红绿灯面前很可能会失效,此时通过红绿灯与车路协同的融合,可以解决红绿灯的识别问题。
如果把单车智能比喻成是在黑夜中为司机照亮前路的车灯,在车灯的照耀下,车辆行驶依然存在不可避免的盲区。
而车路协同的作用就类似于路灯。车灯与路灯结合才能为车辆安全驾驶护航。
一旦系统的安全性提高,其 ODD 可运行范围就能有效地扩大。
最后剩下的问题是,车路协同建设如何在保证安全性、扩大 ODD 的基础上,依然能做到降低自动驾驶系统的成本。
解决了这个问题,车路协同与单车智能结合必然成为自动驾驶技术快速商业化落地的最优解。
分级建设:在中国构建车路协同的可行方案
关于车路协同的技术构建有一个常见的误区:车路协同的基础设施建设是非常昂贵的,要远远超过单车智能的改造投入。
实际上,根据《面向自动驾驶的车路协同关键技术与展望》的白皮书测算:在一定规模下,VICAD 智能化道路所需的升级改造成本要低于单车智能。
据交通运输部《2020 年交通运输行业发展统计公报》数据显示:
截止到 2020 年末,全国四级及以上等级公路里程 494.45 万公里,高速公路里程 16.10 万公里,全国城市道路 45.90 万公里。全国汽车保有量有 2.81 亿辆。
由此可以推算出,只要在每辆车上节省 1.98 万元的成本,就可以在每公里的道路上投入 100 万元的智能化改造。
而如果前期重点选择车流密集一线城市进行试点改造,因为利用率高,实际上分摊到单车的改造成本更低。
以北京为例说明,只要在每辆车上节省 2000 元的成本,就可以在每公里的道路上投入约 50 万元和每个路口投入 81.84 万元的全部智能化设备升级改造。
中国拥有公路 501.25 万公里,高速公路 14.26 万公里,要在如此庞大的公路体系上一次性大面积改建智能化公路,是不现实的。
因此,除了重点城市先行试点建设之外,《白皮书》还提出了:
我国智能道路的发展应兼顾各地公路不同的功能需求,将智能公路的智能化等级进行划分,不同公路采用不同的智能化等级为目标进行规划与建设,也就是分级建设的路线。
《白皮书》根据道路智能化水平分为 C0 - C5 级 6 个等级,道路智能化等级越高,对车辆智能化要求也越低,覆盖的智能汽车等级范围也越广。
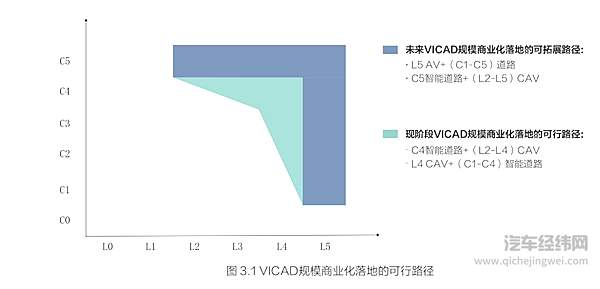
其中,C4 级别的道路特别值得关注。C4 级道路可同时支持 L2+ - L5 级的自动驾驶车辆行驶。
什么意思呢?就是一辆 L2+级别具备辅助驾驶功能的车型经过 C4 级道路,也能变成高度自动驾驶车辆。
除此之外,高等级的智能道路还可服务于智慧城市,形成城市交通的车路云一体化智能化管控,提高通行效率、保障安全。
总得来说,《白皮书》提出的车路协同智能道路建设解决方案是:
以重点城市率先试点,道路分级建设,其中 C4 级智能道路的建设对自动驾驶的大规模落地将起到重要的加速作用。
自动驾驶中国方案:最强单车智能+车路协同
车路协同的落地与单车智能不同,单车智能与汽车行业的关联最大,而车路协同横跨了汽车、交通与通信三大行业,因此在技术落地上需要至少三个行业的协同。
朱西产认为:「只有在中国具有顶层设计的能力,并且政府对于产业有很高的把控程度,车路协同才更容易实现。」
清华大学智能产业研究院 (AIR) 院长张亚勤认为,车路协同恰恰也是中国在智能交通和智能汽车上独特的方案和优势。

百度是自动驾驶领域技术能力最强的公司,清华大学是「车路云一体」的网联智能在中国最早的提出者和践行者。
此次清华大学智能产业研究院 (AIR) 与百度 Apollo 联合发布的白皮书可能是全球范围内第一次发布在车路协同方面的理论参考框架,对全行业针对车路协同的技术落地路径和方案有深度的思考和解读,对形成产业共识有重大意义。
从 2004 年的 DARPA 挑战赛至今,这一轮的自动驾驶产业技术发展已有超过 17 年时间。Google 正式投入自动驾驶技术的开发则已经有超过 10 年时间。
中国自动驾驶如何实现弯道超车,率先安全落地?车路协同的建设将是必经之路。
转载文章,不代表本站观点。
 分享
分享



评论