 返回
发布
返回
发布



最接近马斯克全自动驾驶的升级
2020-01-07 09:09:48
就在2019年的圣诞节前夕,特斯拉带来了2019.40.50版本的OTA升级。在看了这个版本的更新内容之后,我们发现这可能是最接近马斯克自动驾驶梦想的一个版本了。
先看一下目前在2019.40.50中一些已知的一些更新:
1、增加韩国、阿联酋、中国、欧盟的智能召唤
2、增加澳大利亚、新西兰、台湾的Navigate on AutoPilot(NoA)
3、硬件HW3、娱乐控制系统MCU2或美国Model 3全自动驾驶预览版
4、硬件HW2以上增加相邻车道速度
5、Voice Commands, Phone Improvements and Camp Mode for everybody,
6、增加50+项语音控制、露营模式(国内系统语音由百度语音提供,并采用了开源的形式为特斯拉Linux专门开发了全新API接口的百度语音方案)
7、特斯拉影院增加Twitch
8、Model 3和MCU2增加《星露谷物语(Stardew Valley) 》和《西洋双陆棋(Lost Backgammon)》
9、增加通过语音输入文字(Voice Keyboard)回复信息、语音朗读信息
10、为Model 3或MCU2增加“Tesla Beats Music Studio”
11、为选装了空气悬架的Model S Raven增加了“自适应悬挂阻尼(Adaptive Suspension Damping)”
12、增加“按喇叭自动储存行车记录仪片段”的选项
13、增加多个驾驶员账户化设置
14、增加丹麦语支持
15、新的导航功能:用手指在导航按钮上下滑,车辆就会根据日历中的地点开始导航,不需要输入任何内容。若没有添加日程的话,系统会根据用车习惯,比如早上上班、晚上回家等直接进行导航。如果目的地距离超过了当前剩余续航,会导航至充电站。
自动驾驶可视化,AutoPilot开始真正进入城市
其中对于国人来说比较期待的是垂涎已久的智能召唤功能。这项特斯拉于2019年9月底率先出现在美国推送的 V10系统中的Smart Summon功能,通过三目摄像头和VSLAM视觉实时定位建模技术来实现车辆的定位和测距。简单来说就是让车辆自己从停车场的车位中开到停车场另一侧的自己跟前,不必再浪费取车的时间,也不必过分担心车位过小不好往外开。而现在,这项普遍认为在国内很难实现的功能也来了。

根据实测的体验,因为系统仍然非常谨慎,所以智能召唤的成功率并不高,而且在环境更加复杂的国内停车场内,车辆会因为障碍物或行人突然减速制动,所以成功“召唤”所需要的时间也比较长。不过这仍然比一些需要手动遥控车辆出库的功能要酷炫得多了,而且随着日后的不断升级,在一些相对规范和标准的停车场应该还是有用武之地的。
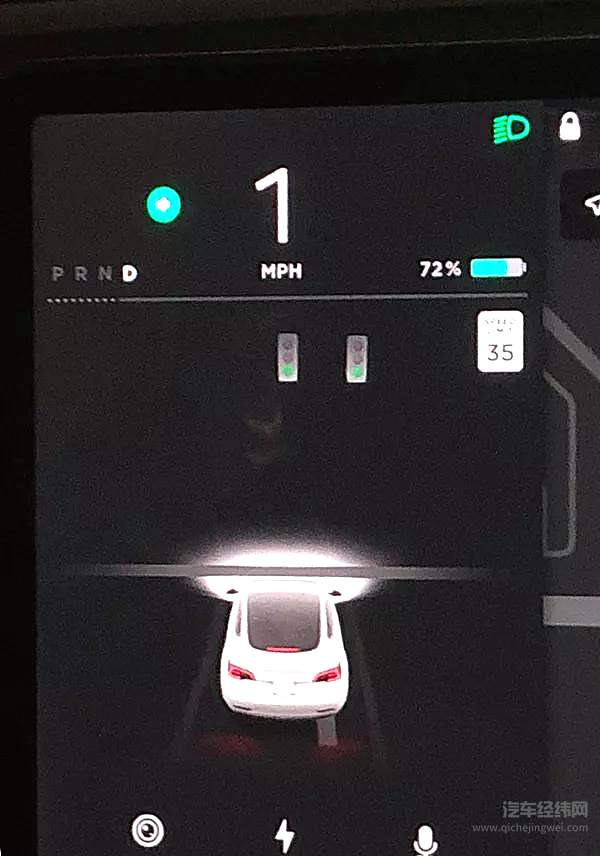
而除了这些细节的功能,最让我们眼前一亮的更新则是自动驾驶识别和视觉化,这一版本的AutoPilot可以识别更多车辆周围的标识和物体展示在屏幕上。其中包括:路边静止垃圾桶、多种交通标示“信号灯、限速识别、停止标识、火车道口”路面标线和方向箭头、自行车道、锥桶;
判断前方或侧方车辆简单,毕竟那么大的目标,但是要实现上面这些物体的识别难度其实要上升到了另一个级别。首先是这些细碎的物体分类需要更加庞大的数据库让系统做对比,而且像垃圾桶、自行车长得都不完全是一个样子,就更别说世界各地的信号灯、路面标线几乎都长得不太一样了。而现在电脑的感知能力不如我们的大脑,我们看起来简单的举一反三则需要更详细的示例,所以系统需要收录更多更全的素材。

其次,系统的图像技术要足够强大的识别能力,比如通过算法在面对强光、反光或能见度低的光线下帮助硬件处理图像,对于相似的标识可以对核心特征做到有效分辨和提取,这些都是需要大量重复的训练以及优化的算法来实现的,也是此前自动驾驶技术发展的一大瓶颈。
这些更新升级所带来的最直接的变化就是AutoPilot已经开始处理更多的城市路况,当然现在系统仍然无法非常完美地处理城市路况、也仍然存一些bug,但也算从高速公路自动驾驶的阶段向下一阶段推进。
这也是为什么我们说,虽然每更新一个版本理论上自然就多了更多的功能、也就离最终实现全自动驾驶更近了一步,但这次2019.40.50跟之前的版本相比仍然更有意义,甚至强过了2019.40.2版本中增加的可以自动变道、上下匝道的NoA。
如果说NoA基本上解决了我们在高速以及城市快速路上的自动驾驶问题的话,那么在城市路况才更是接下来更加棘手的问题。而我们现在看到的2019.40.50,虽然目前在工作中仍然有一些bug,不过已经基本可以覆盖城市工况中需要感知的各种标识,可识别的其它交通参与者也越来越多。
而完成了相对困难的感知和识别问题,剩下的计算和处理这些对于特斯拉来说都不是什么太难的事情,何况每一辆特斯拉都可以提供交通数据,让特斯拉拥有世界上最庞大的“测试”车队来提供训练软件算法,这些都大大增加了AutoPilot在城市中的应用。
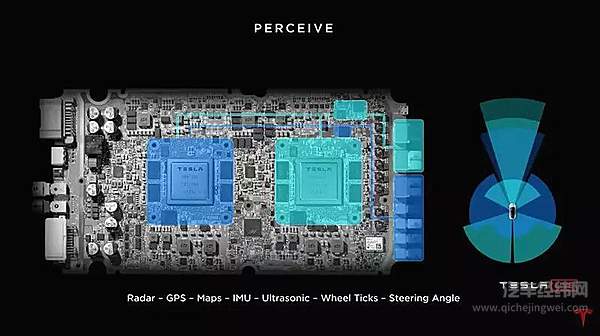
不过这些摄像头可视化的功能均需要配备HW2.5以上的硬件系统作为支持,HW3.0上可以直接实现。特斯拉称新的HW3.0配备了12块2.6GHz ARM Cortex-A72 CPU、两个2GHz神经网络加速器和1GHz的Mali GPU,相比HW2.5,拥有2.5倍的性能和0.8倍的成本功耗。从2020年Q1开始,特斯拉将为HW2.5且购买了FSD的车主升级HW3.0,据说在美国都已经排队等着换了,而接下来在上海工厂生产的国产版Model 3搭载的都是HW3.0硬件。
目前最接近马斯克梦想的一个版本,和不易察觉的“蜥蜴脑袋”
这次的升级又披露出特斯拉一个更重要还看不见的升级——Autopilot的冗余设置。我们之前就知道特斯拉的整个系统不只是一套,而是为了保证驾驶的安全,有几乎一样的两套系统,以防正在使用的这套突然失效而导致事故。而且在特斯拉第三代硬件系统(HW3.0)中跟我们想象的不一样,所谓的备用系统并不是主系统失效后再启动接管,而是两套系统在持续并行计算,互相校验监测,一方失败另一方几乎无缝衔接。

而在此前,备用系统似乎一直呆在”待命“状态的循环中,而现在开始正式工作了。根据国外资料,HW2.5中甚至还有第三套系统,或者更确切地说,还有第三套也可以驱动车辆的同级别系统。
这个被特斯拉内部称作是“Lizard Brain(蜥蜴大脑)”的第三个系统节点(很有可能用的是一块英飞凌Aurix处理器,不同于主系统用的英伟达Parker),除了可以连接CAN总线并驱动车辆之外,还能负责自动泊车和召唤功能,但是却没有接入摄像头系统。也就是说,第三套系统会只通过雷达系统来探测物体。
而且,上面提到的两套主系统也有一些轻微区别,或许是处于计算能力和能耗的原因,其中一套所谓的备用系统并不能接入GPS。Lizard Brain在英语中通常被形容最原始和最本能的事情。所以从这个命名上来看,似乎也说明这第三个系统是更保底的存在,也符合没有接入摄像头的设定。
所以,当相互高度类似的两套出现问题时,还有这个独立于它们之外的“原始系统”工作。
所以,特斯拉在自动驾驶技术的研发和推进上不仅仅在功能实现上下功夫,在我们看不到的系统底层,无论是HW2.5上的三套系统还是HW3.0中的两套并行系统,特斯拉将自动驾驶系统的冗余做到了极致,这些相比不断的功能堆砌更是保障整个系统运行的关键。有了系统底层的基础,上层功能才能更好地建造,上面对城市路况中的交通信号、路边物体的识别就已经是效果的部分呈现了。
随着国产Model 3的正式开始交付,特斯拉在中国这块生产力强大的土地上开始全速生产,无论是车型产品、还是充电桩服务都在以之前从未达到的速度推进。明年的特斯拉就像我们每次预测特斯拉的未来一样,不可预测。
转载文章,不代表本站观点。
 分享
分享



评论